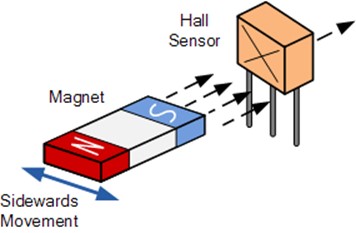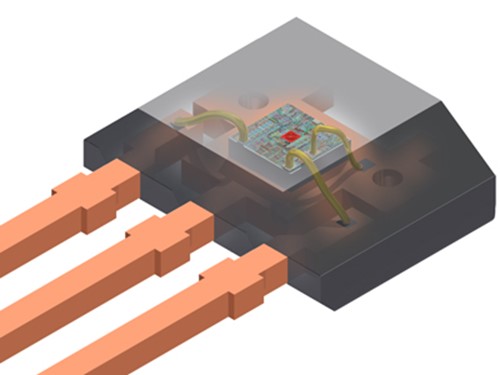
El principi bàsic i pel que es distingeixen d’ altres és que aquest tipus de sensors respon al camp magnètic. Funciona de la següent manera; quan el sensor detecta un camp magnètic els electrons es mouran a un dels costats , de manera que tindrà un negatiu, i un positiu i com a conseqüència donarà un voltatge al qual es coneix com a voltatge hall.
A dia d’avui aquesta classe de sensors es fan servir en aplicacions que necessiten detectors de velocitat o de distància.
Alguns dels avantatges que ens proporciona fer servir un sensor hall respecte a altres sensors són; rara vegada el sensor es veurà danyat per condiciona climàtiques com el vent, aire o una acumulació de sorra en estar integrat a l’interior del motor, al no ser un contacte tampoc li afectarà la fregament, opera a freqüències de fins a 100kHz, és capaç de mesurar la velocitat “0” i grans corrents. Per suposat no tot són avantatges, li poden afectar camps magnètics externs al nostre, genera molta calor, el voltatge d’òfset és alt i el senyal pot ser bloquejat per un metall ferrell .
Existeixen diferents tipus d’ aquests sensors, entre ells:
- El sensor hall unipolar de contacte (referència A417) que s’encén en detectar el camp magnètic i es paga quan deixa de detectar-lo.
- El sensor hall bipolar d’enclavament (referència A229) que s’encén amb un dels pols i guarda l’estat fins que detecta el pol oposat.
- El sensor hall de distància (referència A324) que detecta el camp magnètic de manera gradual. Si no detecta cap dóna la meitat del seu vmax 2,5 V i depenent del costat de l ‘ imant que estiguis usant el voltatge de sortida incrementa fins a 5 V o baixa fins als 0 V.